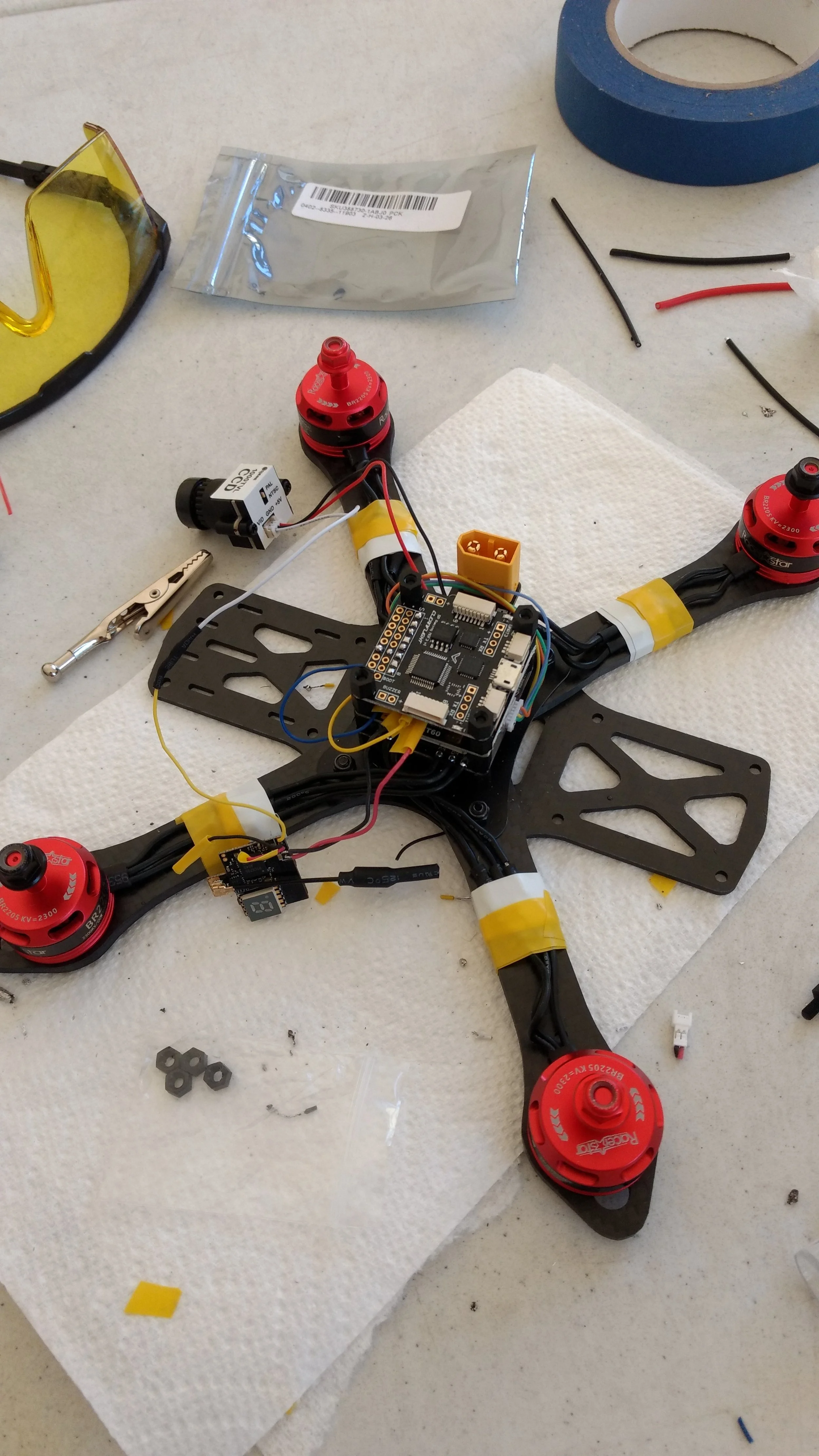
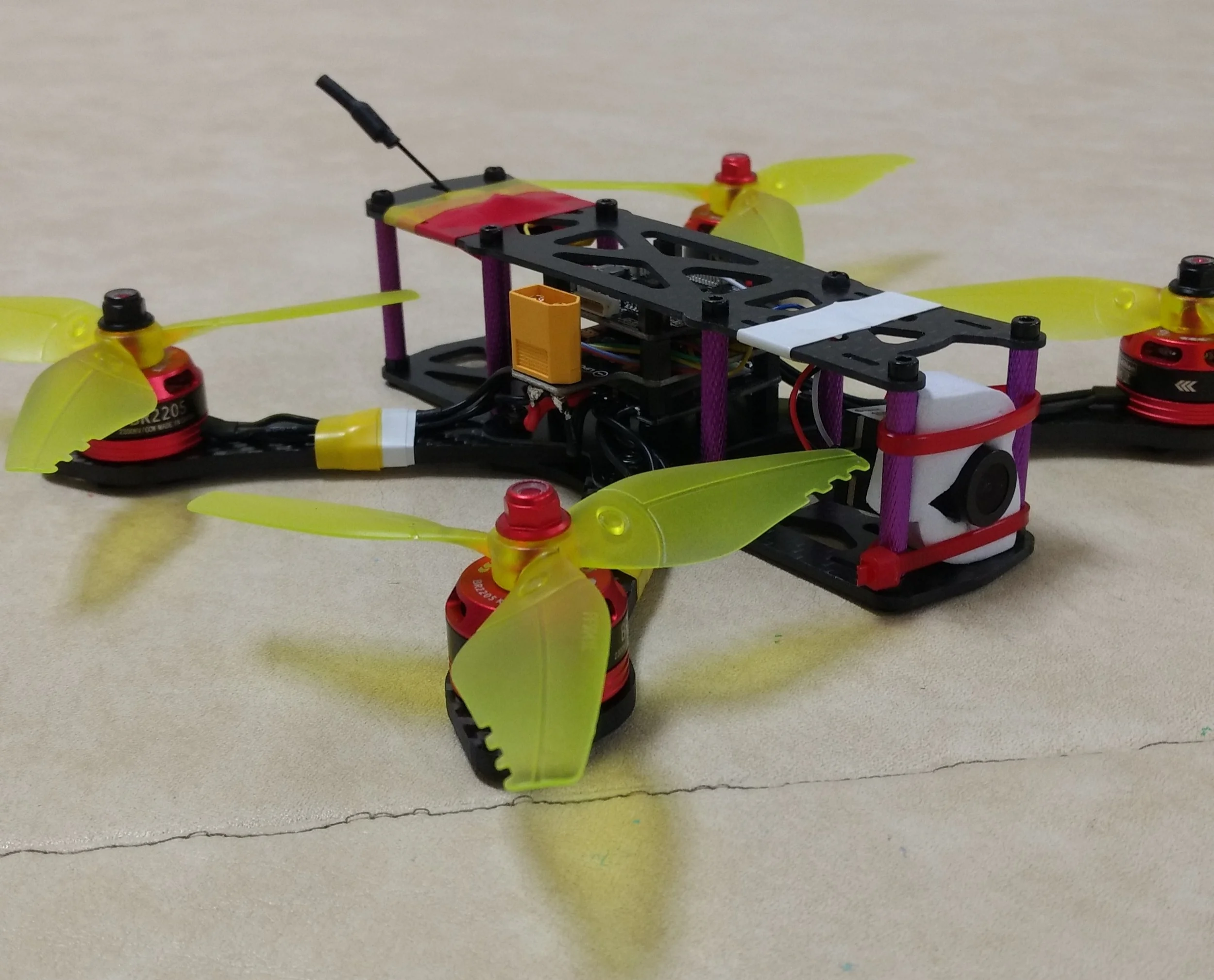
I’m crazy about building the weirdest and coolest things. Here’s just a snapshot of stuff I’ve worked on.
From Mars rovers to high altitude balloons to piano-playing robots.

Who even am I…
My name is Samuel Chen, and I’m currently a Reliability Engineer at Meta. I’ve done everything from launch robots really fast at Mars to design new hardware for consumer electronics.
I’ve been in the consumer electronics industry for about 6 years now; first at Amazon Lab126 working on wireless earbuds and FireTV connectivity solutions, and then currently at Meta working on AR/VR devices and display glasses. In the past, I was also a part-time employee at NASA Jet Propulsion Laboratory for 2 years. I specialized in automating and writing software integration tests for a lot of the robotics and motor control features of the Mars 2020 rover (drive system, power distribution, telecom).